Classification of Wheeled Mobile Robot Configurations
March 8, 2022
Throughout the years, mobile robotic systems have shown time and time again their irreplaceable role in modern society. Firstly, they were only utilized for research purposes and employed within manufacturing or storage environments. However, nowadays, mobile robots started infiltrating the everyday human environments such as hospitals, hotels, and even personal houses. Vacuum cleaning mobile robot such as Rumba has become a common gadget in numerous households. To better understand how these mobile robots work or to get a new revolutionary idea for their usage, we need to comprehend their basic classification, differences, and specifications.
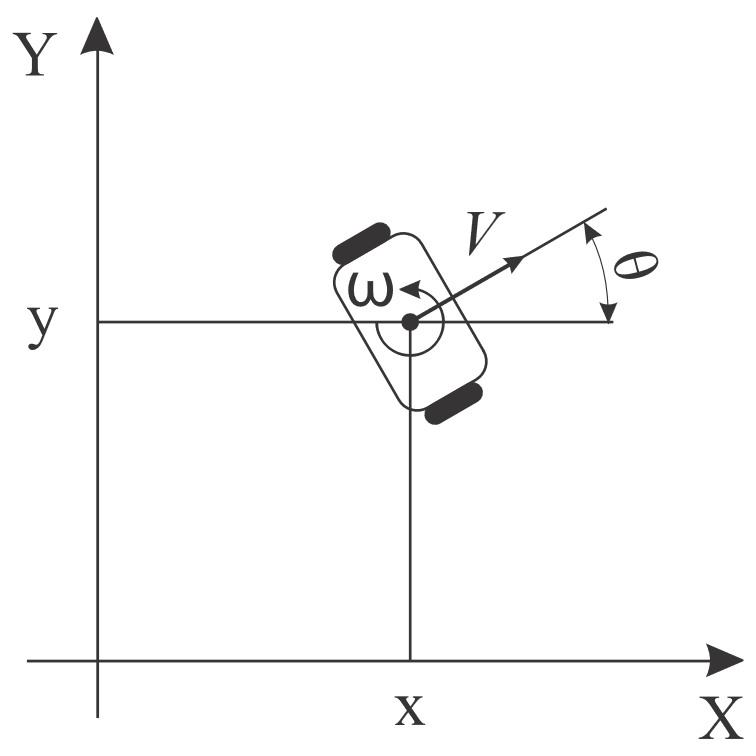
In order to differentiate between different classes of mobile robots, firstly, we need to understand how their location is defined in the environment, i.e., in the absolute coordinate system. For majority of indoor ground mobile robots, the state space can be defined with position (x and y coordinates) and orientation angle θ. The position and orientation of the mobile robot jointly represent its pose. A mobile robot with defined state space is given in Fig. 1. Moreover, the movement of a mobile robot can be defined with its translational (V) and angular velocity (ω).
Secondly, we are going to define types of wheels that can be used to make a mobile robot drive system:
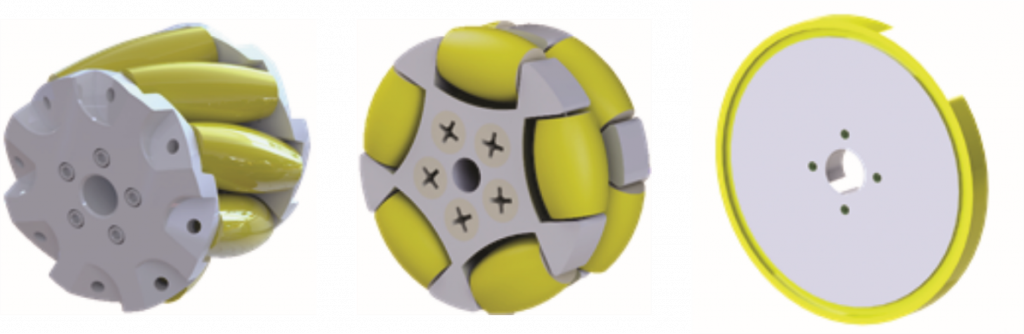
- Standard wheels (Fig. 2, right)
- Omnidirectional wheels (Fig. 2, left and center)
The main difference between these two types of wheels is that the standard wheel allows only rotation forwards/backwards, while omnidirectional wheels allow the movement in the direction perpendicular to the wheel’s body. This way, omnidirectional wheels have increased maneuverability at the expense of increased wear and tear, and lower maximum allowed velocity.
According to these two types of wheels, we can classify three basic mobile robot types (Fig. 3.):
- Differential drive robots,
- Car-like mobile robots,
- Omnidirectional robots.

car-like mobile robot – center, omnidirectional mobile robot – right)
Differential drive mobile robots are defined with two parallel wheels utilized for the drive system and one or more caster wheels utilized to maintain the mobile robot’s balance. Alternatively, a differential drive mobile robot could have four or six wheels, where each pair of wheels is positioned on the same horizontal axis. However, there is no need for an additional caster wheel to keep the mobile robot balanced in those four and six wheels configurations. The rotation of the differential drive mobile robot can be done without changing its position when one wheel rotates forward while the other rotates backward. The procedure by which a mobile robot with differential drive moves from one pose to another is shown in Fig 4a). The mobile robot rotates to the desired position, then performs translation until the desired position is reached, and executes one last rotation to achieve the final pose.
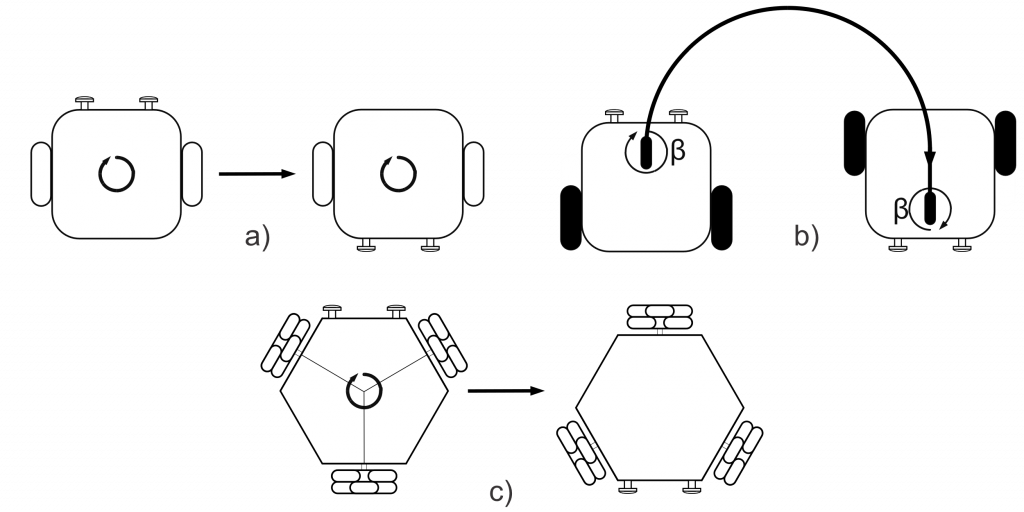
The second type of robot is known as a car-like robot. Their kinematics scheme is defined with two fixed parallel wheels used for propulsion and one or two non-driven wheels used for maneuvering purposes. The additional maneuvering angle β is required to define the state-space of this type of mobile robot. The process of moving the car-like mobile robot from one pose to another is presented in Fig. 4b). Angle β is set to the desired value, and the translation is executed until the mobile robot reaches desired pose.
There are usually two types of omnidirectional mobile robots, the ones with three and the ones with four wheels. The main difference between omnidirectional mobile robots with three and four wheels is the type of utilized wheels. Mobile robots with four wheels use mecanum wheels (Fig. 2, left), while mobile robots with three wheels use omnidirectional wheels (Fig. 2, center). The significant advantage of robots with three wheels is in lower complexity in terms of a number of electro-mechanics elements, but the advantage of four-wheel omnidirectional mobile robots is that they have less complex kinematic and control systems. Compared to the other two types of robots, the major advantage of omnidirectional mobile robots is their increased maneuverability since they can move in any direction. The omnidirectional mobile robots can move from one pose to another in one maneuver by performing both translation and rotation simultaneously (Fig. 4c).
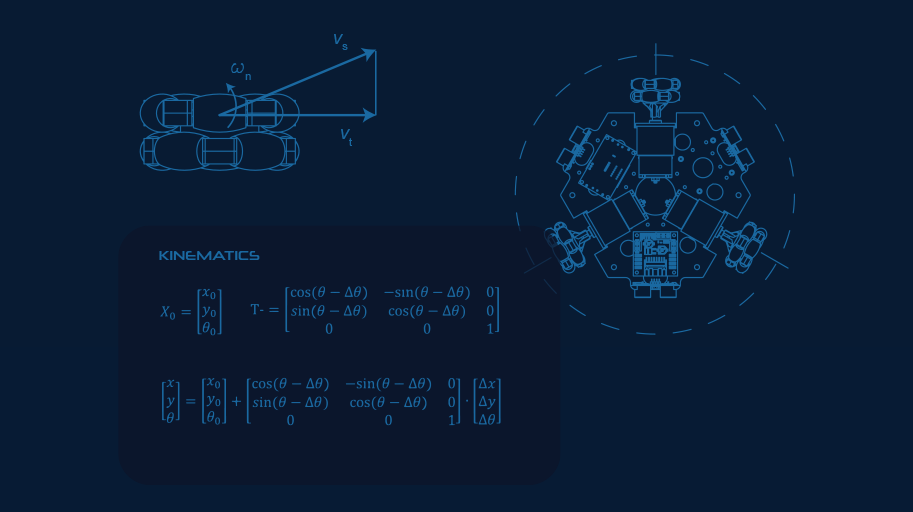
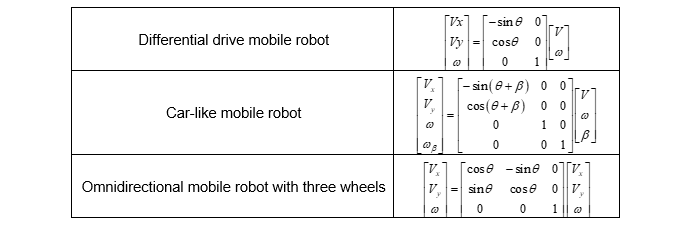
Finally, mathematical formulation utilized to define mobile robots’ position and orientation after some of the mentioned maneuvers have been performed is given in Fig. 5
References:
- Campion, Guy, Georges Bastin, and Brigitte Dandrea-Novel. “Structural properties and classification of kinematic and dynamic models of wheeled mobile robots.” IEEE transactions on robotics and automation 12.1 (1996): 47-62.